
BIM en la reconstrucción del patrimonio
Aplicación de los modelos de información en la reconstrucción del patrimonio.
Los softwares para el modelado de información constructiva (BIM), los cuales actualmente se encuentran ocasionando una revolución en el gremio de la construcción, cuentan con el suficiente potencial para expandirse a otras áreas de la arquitectura tales como la protección y reconstrucción del patrimonio; ya que, debido a su enfoque en el diseño y modelado de edificaciones, las cuales no se limitan al área de la mera proyectación ha sido utilizada para el modelado de piezas arquitectónicas que consideradas como patrimoniales.
A continuación, se presenta un trabajo de reconstrucción realizado para un antiguo edificio de la ciudad de Medellín, del cual solo se conservaron fotografías y escasa planimetría. Mediante un proceso de análisis y modelado fue posible la reconstrucción de gran parte del edificio, permitiendo entender la no solo la espacialidad sino también la tecnología de su época, permitiéndose con ello la generación información planimétrica.
Trabajo de grado para optar por el título de arquitecto por el estudiante de la Universidad Nacional, Cristhian Bustamante Vásquez:
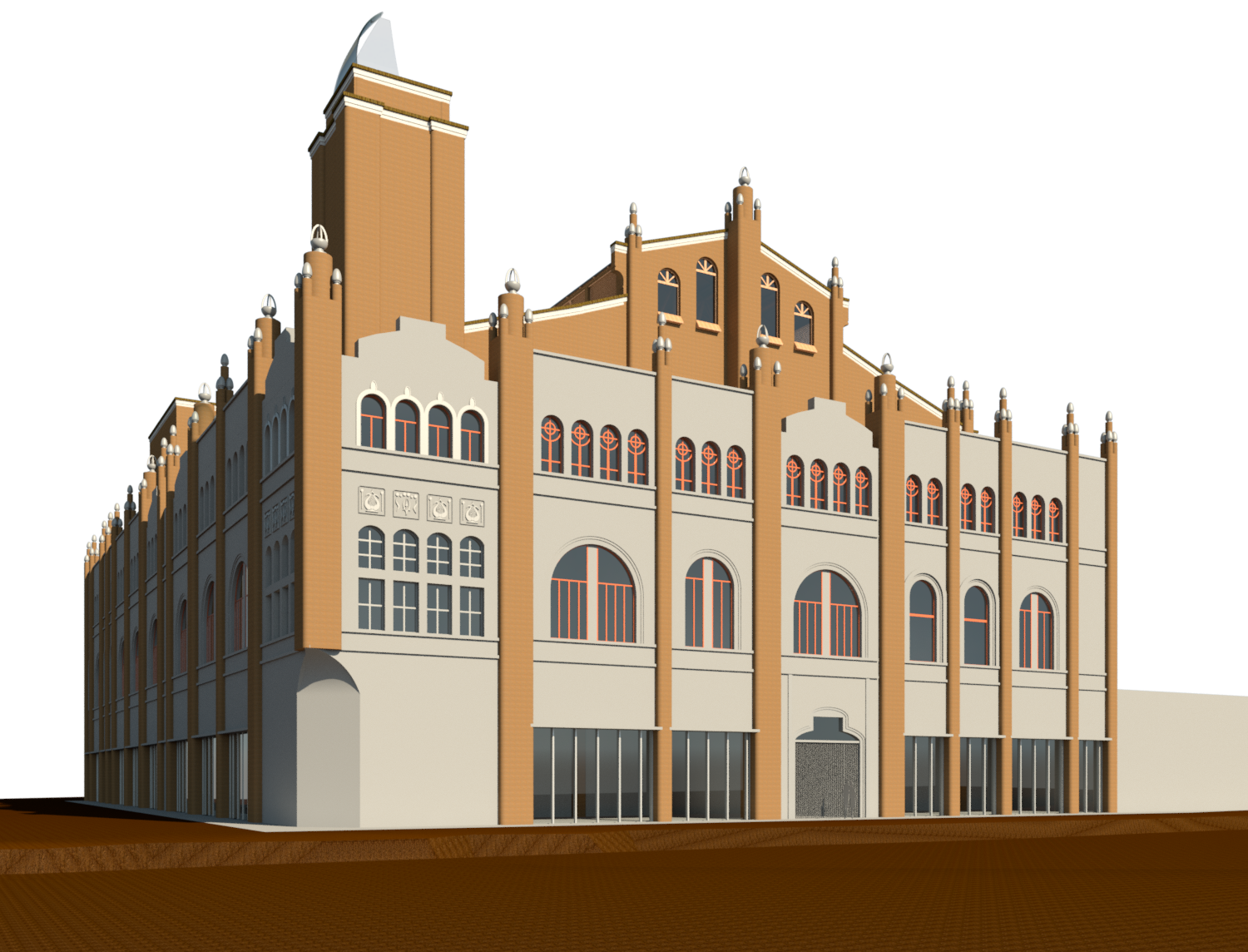
RECONSTRUCCIÓN VIRTUAL DEL PATRIMONIO INMUEBLE MEDIANTE MODELOS DE INFORMACIÓN CONSTRUCTIVA (BIM). CASO DE ESTUDIO: EDIFICIO GONZALO MEJÍA (TEATRO JUNÍN Y HOTEL EUROPA)
HISTORIA DEL EDIFICIO.

Durante los años 20, época en la que el cine era un invento reciente y apenas comenzaban a filmarse las primeras películas, un grupo de ricos empresarios de la ciudad de Medellín formaron el Consorcio Fomento, una compañía comercial que tenía como finalidad el desarrollo de aquella industria en Colombia.
El edificio fue construido sobre la mejor esquina del centro de Medellín, en el cruce de la quebrada Santa Elena (Avenida la playa) y la carrera Junín en un lote de 60 m por 42 m cuya cara alargada daba hacia la carrera Junín
Su diseñador no fue otro que el arquitecto Belga Agustín Goovaerst, siendo el edificio Gonzalo Mejía su primera obra importante en la ciudad de Medellín, terminándola en 1924.
El edificio fue inaugurado con la proyección de la película “La sombra” de Charles Chaplin, que termino marcando el énfasis del edificio, pues, a pesar de contar con una gran tramoya para el teatro su función termino ligada al cine, proyectándose las películas traídas por Don Gonzalo Mejía

Con el paso de los años y el cambio de los gustos el edificio fue entrando en una etapa de decadencia y abandono, afectado por la construcción de otros teatros y cines, “donde solo los amantes de las comodidades tradicionales y no de lo snob, iban a buscar su alojamiento. Como todo en la vida, llego el momento en que hubo de cambiar de propietarios y de esta manera paso a manos de la familia Marín” (Rafael Ortiz Arango. Crónicas e Historias del Medellín Antiguo. Tomo 1 Pág. 57).
El edificio fue finalmente demolido en 1968 para dar paso a la construcción del edificio Coltejer.

A partir de la información encontrada en las bases de datos del Archivo Histórico de Medellín, La Fundación Antioqueña para los Estudios Sociales (FAES), archivos de la biblioteca Efe Gomez y Hernán Garcés de la Universidad Nacional de Colombia y fotografías de la biblioteca pública Piloto se analizaron los datos y se generó el modelo.
PROCESO:
- A partir de la información planimétrica del lote se permitió orientar y dimensionar el tamaño del edifico. Pues se contó con los datos básicos del lugar requeridos por el software BIM.

- Mediante las fotografías antiguas del edificio se pudieron obtener bosquejos de las fachadas a fin de ser modeladas en el edificio, comenzando su análisis previo mediante CAD para luego modelar la fachada mediante el Software BIM.

- A partir del análisis de las fotografías se vislumbró la distribución y la espacialidad del teatro, a fin de modelar los elementos a partir de los ejes y las estructuras planteadas por el arquitecto del edificio, es decir, realizando una reinterpretación de la obra a fin de reconstruirla con el modelo.



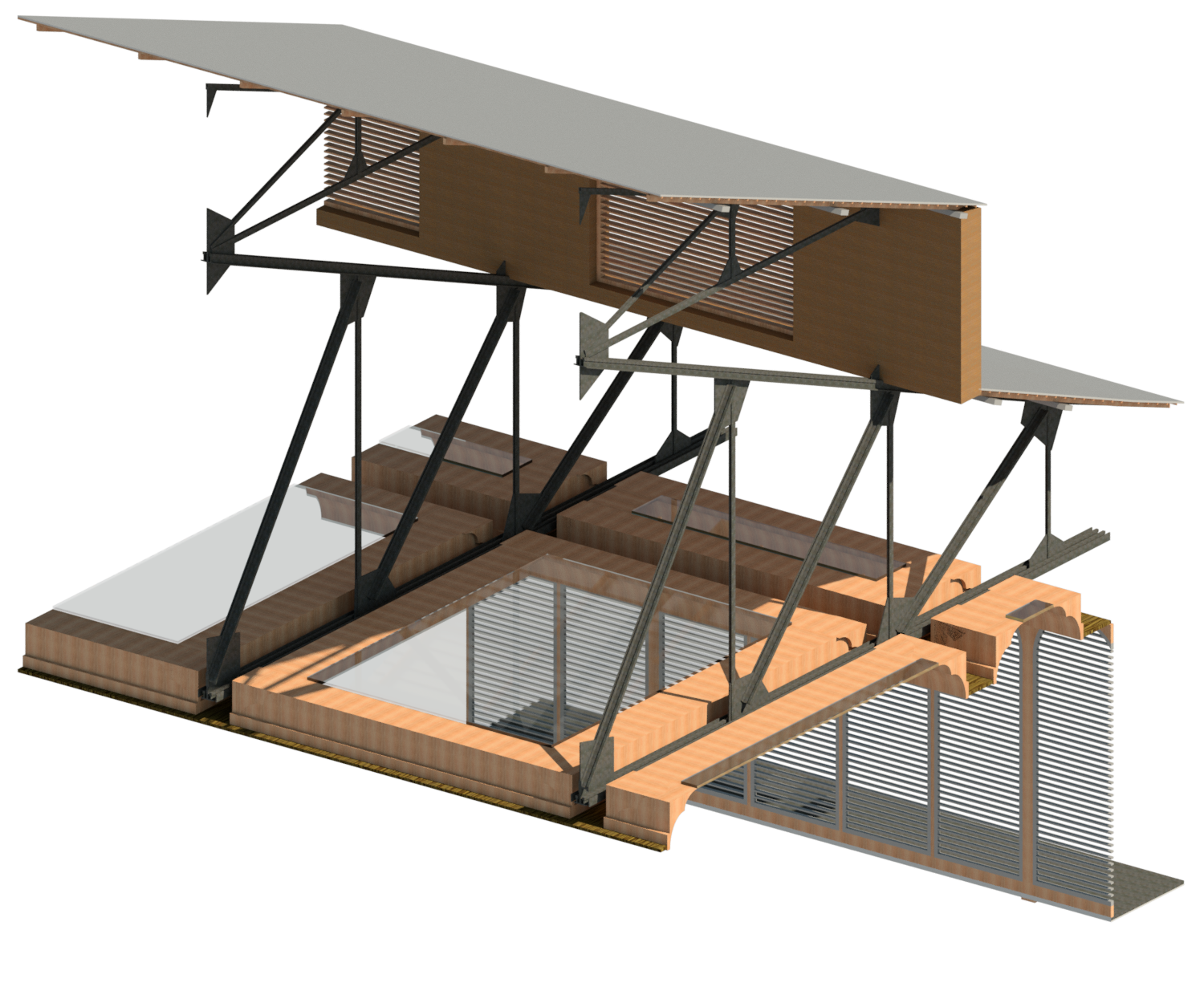
- Mediante información planimétrica del detalle de la cubierta se modelaron las armaduras del teatro, la cubierta y el cielo falso, contándose con medidas reales que permitían espacializar con mayor exactitud el modelo.


La información anteriormente mencionada, la cual hace referencia a datos del terreno (civiles), ejes (estructurales), fachadas (arquitectónicos) y detalles (constructivos) respectivamente, al ser consolidadas en una misma herramienta permitían que, al igual que ocurre con la metodología BIM, el modelo más que un resultado final fuera una herramienta que permitía unificar toda la información encontrada, pues, cada dato del edificio era de vital importancia para su reconstrucción, pero solamente al ubicarlo dentro del conjunto era posible determinar su papel y permitir que este contara más información del edificio.
En donde, por ejemplo, los ejes descubiertos en las fachadas permitían ubicar las columnas interiores, o las dimensiones de las cerchas que sostenía la cubierta permitían proporcionar las dimensiones del escenario, comparaciones que no podían ser realizadas a simple vista.
RESULTADOS:
Gracias a las capacidades de interoperabilidad del software BIM dentro de la información generada se encuentra la planimetría general del edificio, obteniéndose las plantas, secciones y elevaciones; junto con información tridimensional como secciones isométricas, imaginarios e imaginarios interactivos.








Mediante el uso de los servidores de Autodesk el modelo se encuentra disponible para su visualización gratuita, permitiendo el acercamiento de estas piezas patrimoniales a un público que no está familiarizado con información técnica.
| Ubicación | Descripción | Enlace de acceso |
 | Escenario del teatro Junín, desde donde se observa el auditorio, el acceso, el cielo falso y la tramoya. | http://pano.autodesk.com/pano.html?url=jpgs/aba1a520-f066-42eb-b23e-9383b07656cd  |
 | Volumen interno de la cubierta, desde donde se observa la tecnología utilizada para sostenerla. | http://pano.autodesk.com/pano.html?url=jpgs/6c6d47e2-bf45-4bf9-831b-6cc7692f639e  |
PUBLICACIÓN DEL MODELO EN LA RED.
El enlace público para acceder al modelo es el siguiente: http://a360.co/2q98lCw


BIM nuevo paradigma
El modelado de información para la edificación o BIM (por sus siglas en inglés, Building Information Modeling), es una metodología de trabajo que permite la interacción de las múltiples disciplinas que están involucradas en el ciclo de vida de una construcción. Esta interacción permite que la generación y gestión de datos pueda ser realizada en tiempo real a través de software especializados, lo que conlleva a la optimización del tiempo y los recursos durante el proceso de diseño y construcción.
No debemos confundir BIM con CAD, ambos son paradigmas totalmente distintos, si bien es cierto que el segundo de ellos fundo las bases para el desarrollo del primero, CAD se enfoca solo en las herramientas de diseño e impactan solo a las áreas técnicas de un proyecto; mientras que BIM está enfocado en el proyecto desde su concepción hasta su finalización, esta metodología impacta a todas las áreas que se involucran en el desarrollo de un proyecto, a saber, gerencia, construcción y usuarios finales.
A pesar de que BIM se apoya en las herramientas CAD, este va mucho más allá, pero esto es posible solo si se acepta este nuevo paradigma de trabajo y se realiza una correcta implementación; de lo contrario, podremos estar trabajando con herramientas BIM nativas y solo estar facilitando las labores técnicas de generación de planos.
La metodología BIM permite realizar la gestión, administración y documentación, además de permitir la efectiva comunicación entre los involucrados en el desarrollo de un proyecto, esto permite que cada uno de ellos vea el mismo modelo con la misma información asociada en tiempo real, y cada uno de ellos utilizara esta información de acuerdo a sus necesidades; si el modelo cambia, este se actualiza y, nuevamente todos los involucrados podrán ver y consultar el modelo y toda información asociada.
Por otra parte, BIM permite la detección de errores y fallas en las etapas iniciales del proyecto y permite minimizar y optimizar el flujo de información desde y hacia las áreas técnicas. Otro punto importante es la realización de simulaciones de las etapas constructivas, permitiendo de esta forma detectar interferencias entre los elementos constructivos.
Además de todo lo mencionado, la metodología BIM permite:
• Generar, evaluar y realizar seguimiento al proyecto.
• Analizar y documentar el proyecto.
• Realizar la construcción con toda la logística que esto requiere.
• Operación y mantenimiento del proyecto.
Al permitir realizar todas estas tareas, la metodología BIM logra la optimización de tiempo y recursos, logrando minimizar los desperdicios que conllevan una mala gestión y, permite realizar tareas de reciclaje al momento de que la obra llegue a su fin o la misma sea demolida por llegar al final de su ciclo de vida.
Por todo esto BIM, es el nuevo paradigma que comienza a regir los procesos de los proyectos constructivos y su continua implementación por parte de las empresas y gobiernos, permitiendo que esta se adopte como un estándar para la industria en un corto plazo.

Cómo los datos aéreos ayudaron a PCL a transformar su flujo de trabajo de topografía
Cómo los datos aéreos ayudaron a PCL a transformar su flujo de trabajo de topografía
En enero de 2017, PCL Construction inició el primer proyecto de Crystal Lagoon en Estados Unidos, justo al norte de Tampa, Florida. La laguna de 7,3 acres será la pieza central de un desarrollo de 3.000 viviendas, y los futuros residentes podrán nadar, hacer kayak, paddleboard, y disfrutar de la playa justo en su patio trasero.

PCL utilizó drones en el sitio como una herramienta de control de calidad y QCR y el 15 de marzo 3DR organizó un seminario con PCL para compartir cómo incorporaron los drones en este proyecto. Bill Bennington, Gerente de Construcción Virtual de PCL Orlando, y André Tousignant, Especialista en Construcción Virtual en PCL Orlando, dirigieron el seminario y discutieron cómo usaron los drones para transformar su flujo de trabajo de topografía. Para ver la grabación, haga click aquí.
El reto Como la primera laguna de su tipo que se construyó en los Estados Unidos, y PCL tuvo que superar tres retos principales para asegurar que el proyecto se desarrollara sin problemas:
1. Verificar las elevaciones de grado en las fases clave del proyecto: antes de romper el suelo, después de completar el trabajo auto-realizado y antes de entregar el sitio al propietario.
2. Priorizar y enfocar de forma eficiente el QC tradicional en el campo en un sitio con una gran huella.
3. Compartir el progreso y los datos tanto interna como externamente con las partes interesadas del proyecto.
La solución:
Site Scan con un solo Drone 3DR Solo PCL se asoció con 3DR para utilizar nuestra plataforma Site Scan para examinar la laguna, hacer que su proceso de QA / QC sea más rápido y eficiente, comunique y comparta el progreso, y mucho más. Bennington explicó la decisión de ir con 3DR: «Lo que vino a ser para nosotros el flujo de trabajo simplificado, el soporte que recibimos de 3DR y la escalabilidad del producto. También nos gustó tanto el hardware y software 3DR, como la integración que 3DR tiene con Autodesk en el procesamiento en la nube «.
Los ingenieros de campo de PCL obtuvieron su Certificación de Piloto Remoto y rápidamente se pusieron en funcionamiento con drones en el sitio. En primer lugar, establecer puntos de control de tierra muy visibles, introducir los puntos en el escaneado del sitio y garantizar la precisión mediante el uso de puntos de control independientes. Antes de cada vuelo, los pilotos completaron una lista de verificación de seguridad antes del vuelo y usaron el botón «refly» para realizar exploraciones automáticamente. Para obtener más información sobre el flujo de trabajo de campo del programa de drone, escuche directamente de Bill Bennington de PCL en una grabación de video de nuestro seminario web sobre este proyecto.
Para obtener más información sobre el flujo de trabajo de campo del programa de drone, escuche directamente de Bill Bennington de PCL en una grabación de video del seminario web sobre este proyecto.
«Lo que vino a ser, para nosotros, fue el flujo de trabajo simplificado, el soporte que recibimos de 3DR, y la escalabilidad del producto. También nos gustó usar tanto hardware 3DR como software, junto con la integración que 3DR tiene con Autodesk en el procesamiento en la nube. «- Bill Bennington, PCL
Resultados Clave
- Millones de puntos precisos

Una encuesta típica recoge una cantidad limitada de puntos precisos, usualmente alrededor de 15-20. Con Site Scan, PCL pudo recolectar millones de puntos precisos en una fracción del tiempo que requeriría una encuesta regular.
Por lo general, un agrimensor lleva una semana para realizar este tipo de estudio, procesar los datos y exportar el PDF, el archivo CAD y los contornos. Con una solución de drone a cloud, PCL fue capaz de cortar este proceso en sólo 1,5 días: tarda 10 minutos para volar el drone y transferir los datos a la nube, hasta una hora para procesar el trabajo, y un día para exportar el Archivo CAD y contornos, además de orthoimagery y una nube de puntos.
2. QC enfocado

Con un perímetro de 4.382 pies, la Laguna de Cristal tiene una gran huella que PCL quería ayudar a cubrir con un zángano. Siguieron en el sitio para el control de calidad, pero ahora que también podían usar el 3DR Solo para volar el sitio en cuestión de minutos, capturar datos aéreos y acercarse fácilmente para imágenes de alta resolución. Con la combinación de drones y topografía in situ, su proceso de QC se volvió más centrado y eficiente.
3. Escaneos regulares, actualizaciones periódicas del progreso

El equipo de PCL utilizó Site Scan para crear una ruta de vuelo para el sitio, luego pudieron volver a volar el mismo camino para capturar automáticamente escaneos de la laguna. Esto les facilitó recolectar imágenes detalladas y compartir actualizaciones de progreso frecuentes con sus clientes y otras partes interesadas.
Artículo tomado de 3DR